Secure assets with Robotics and AI.
Save costs and get quantitative insights of your premises.
Say hello to next gen security.


















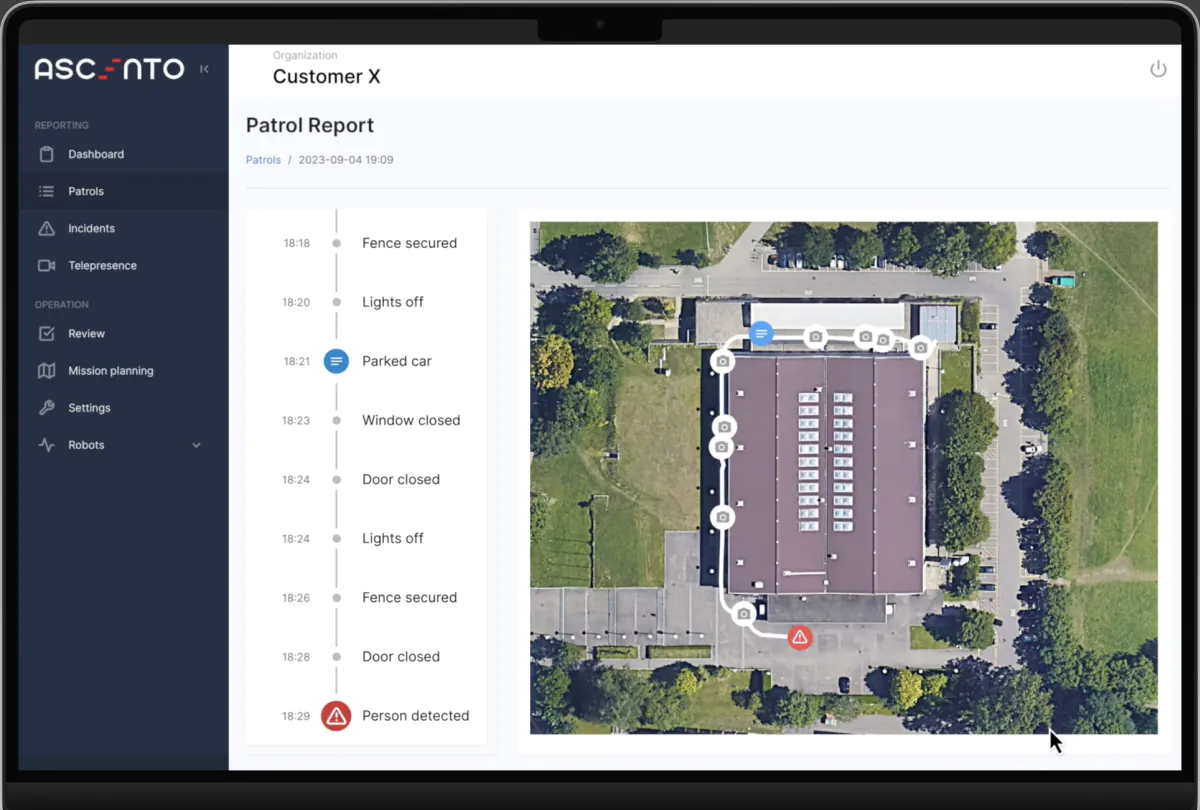
Detect people on premises
Verify perimeter integrity
Record property lights
Scan for thermal anomaly
Control parking lots
Check doors and windows
See it in action.
Level up your site’s security.

autonomous
all-terrain robot
all-terrain robot
Level up
your site’s security.
Detect threats faster with greater accuracy
Tailored to you, hired by the hour
Reduce cost from day one
Provided as a comprehensive Robotics-as-a-Service solution.
Ready. Set. Guard.
Robot


Autonomous charging with over 4 hours of battery life


All weather capable. Rain, snow, or wind


Safe autonomous walking speed


Payload system including thermal, RGB, and infrared cameras
Manage and monitor.
App
Control your robot anytime, anywhere.

Control your robot anytime, anywhere


Encrypted live communication
Configurable patrol scheduling


Powerful reports leveraged by AI


Integrates with existing video management systems
We got you covered.
Service


Turnkey solution with immediate cost-benefits


Training and onboarding
Guaranteed up-time with 24/7 support
Install in hours and benefit from our full service package with guaranteed up-time and fast replacements.


Supported by the finest


